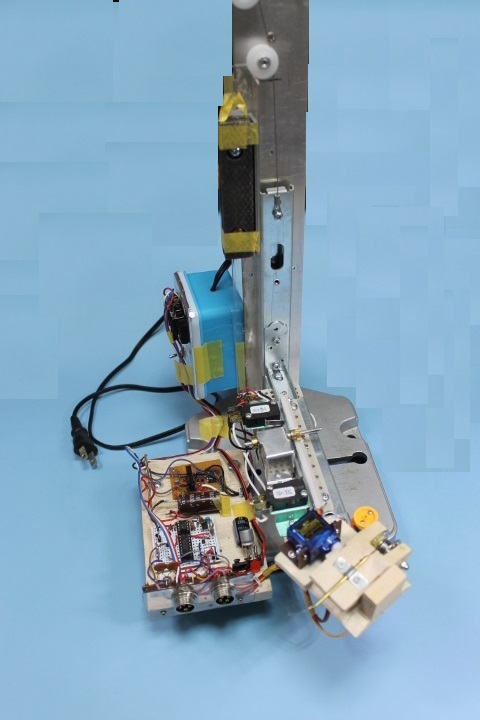
プリンタ基板上に細かい電子部品をハンダ付けする際に役立つ装置です。 例えば、抵抗器を基板に固定する場合、抵抗器の銅線を基板上の導体に密着させ、その密着地点に糸状ハンダとハンダゴテの小手先を同時に当てると、必要量のハンダが密着点に溶け出してうまく作業できます。 しかし、手作業でやるときは、左手で抵抗器をつまんで、右手でハンダゴテを持つことになるので、糸状ハンダを目的地点に同時に当てることができません。なので、普通は先に銅線や基板上の導体上にハンダを盛っておくことになります。 この装置は、糸状ハンダをハンダ付けの目的地点に供給するものです。
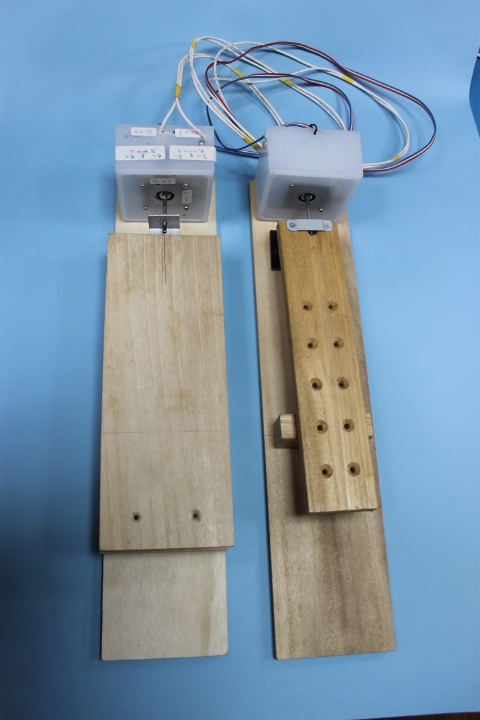
| 糸巻に巻いた糸ハンダを部材に固定して、糸ハンダの先端を上下(X)左右(Y)、手前と奥(Z)方向に移動させます。 X-Y方向はサーボモータ、Z方向は汎用の直流モーターを使っています。 | 足を載せて操作します。 左側は上下(X)左右(Y)の方向、右側は手前または奥(Z)方向に操作する器具です。 写真撮りの際に、左右の配置を間違えました。聞き足である右足で上下(X)左右(Y)の方向を操作する方がやりやすいです。 |
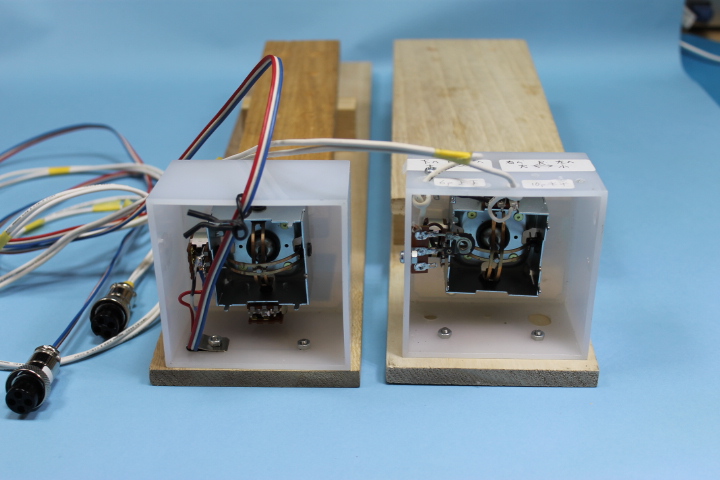
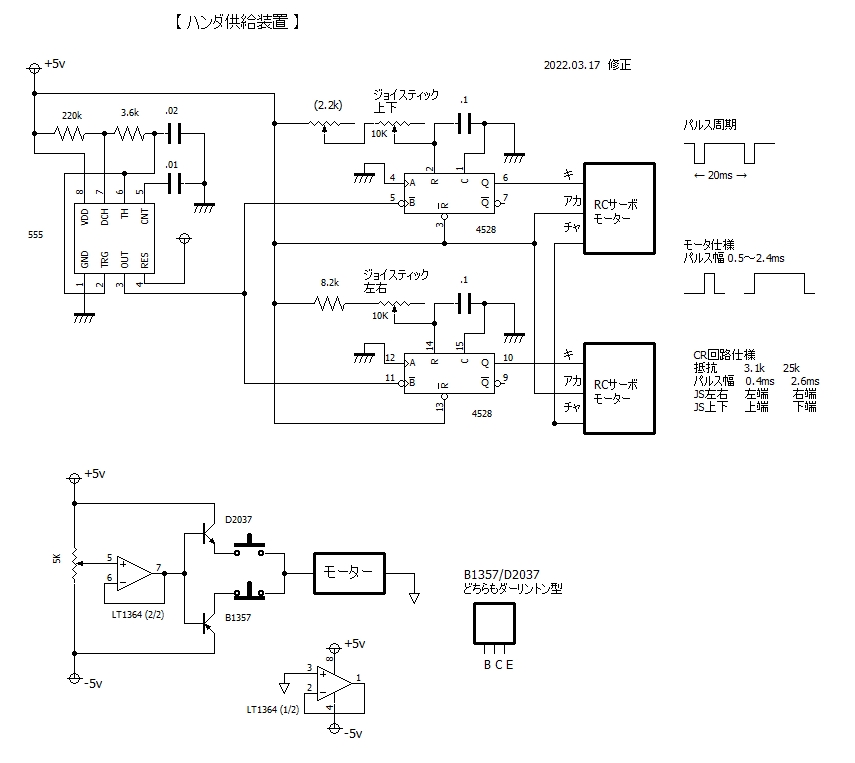
| RCサーボモータで上下(X)左右(Y)の駆動、通常の直流モータで手前と奥(Z)方向に駆動しています。 RCサーボモータはパルス信号で制御するので、PICマイコンが利用される例が多いですが、こういう単純な制御では、タイマーIC 555等でシンプルに回路構成できます。 また、この直流モータは、何かの廃棄機器から外した小型のジャンク品です。無負荷だと乾電池1本でも回転してました。 直流モータは、よくPWM制御されますが、このモータは小電流で駆動できるので、トランジスタで電流制御するシンプル回路でうまく動作しています。 |
|
操作練習と動作確認です。 コントローラの足の操作に慣れていません。 ハンダの先端が震動してるのは、555の発振回路へのノイズ混入が原因かと思います。 |
ハンダ付け作業の模擬練習です。 ハンダゴテは加熱してません。 |
自作情報、交換しませんか。 お問い合わせはこちらからどうぞ。